研究紹介
後藤哲哉
患者さんたちに脳の手術の説明をすると、「脳神経外科の手術って怖い。」「脳をさわっても大丈夫なんですか。」と質問をうけます。その感覚は間違っていません。神経はとても繊細で、手術操作で障害がでれば戻らないからです。私達脳神経外科の仕事は「脳の病気を手術で治す」です。手術を「絶対失敗しないので」と返事できれば良いのですが、残念ですが無理です。患者さんたちに病気のことや治療の方法を説明してその危険性について納得してもらうことは、治すことと同じくらい重要です。その一方で私達は、その危険性をすこしでも少なくするための方法を研究し、今後治療を受けられる患者さんにより良い治療を提供する責務を負ってます。私のこれまで行ってきた研究について説明します。
弱い神経を手術侵襲から守るためにはどうしたら良いでしょうか。その一つとして手術操作をしているだけでは気が付かない障害を見つけて、手技を変更するという方法があります。私は、術中に予期しない障害の発生を検知することや、予想される障害が予想の範囲内にあることを確認することは、手術操作を行うことと同じ重要なことと考えています。
患者さんの言語機能を温存する方法について考えてみましょう。最も確実なのは患者さんに実際におしゃべりをしてもらうことです。思い通りにしゃべれれば大丈夫。これを手術中に行うのを覚醒下手術と呼んでいます。障害がでそうな操作を行う前に患者さんに起きてもらっておしゃべりをします。障害がでれば操作をすぐにやめる。そうすることで症状がでる限界までの操作ができます。頭を切ってる最中に起きるのは怖いかもしれません。でも術後に目が覚めたときに具合が悪くなることよりは良いはずです。脳組織自体は痛覚がないので痛みはありません。でも皮膚を切ったり頭蓋骨を外したりする時は痛みが出ますので、その時は全身麻酔で過ごしてもらい、その後で目を覚ましてもらう方法が一般的です。

覚醒下手術 手術室:手術している場所を指すナビゲーション装置(左)と、機能の場所を確認、記録するための神経刺激装置と記録装置(右)
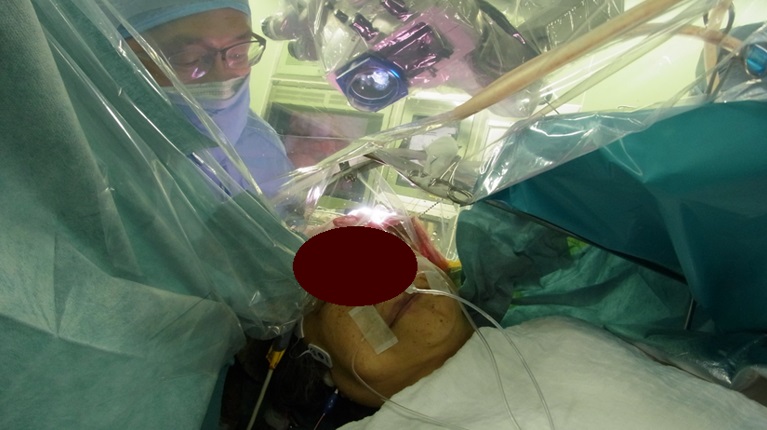
頭蓋骨を外して脳を触る段階になったところで目を覚ましてもらいます。(患者さんの同意を得て掲載しています。)

神経機能の位置を測定し、顕微鏡下に腫瘍を摘出していきます。(患者さんの同意を得て掲載しています。)
そうはいっても、数時間かかる長い脳神経外科の手術中ずうっと起きて検査をうけてもらうのは大変です。おしゃべりや計算など難しい作業は覚醒下手術が必要ですが、神経回路の比較的単純な脳機能は患者さんに行ってもらわなくても確認できます。神経回路は回路の上流に刺激を加えると、その下流でその刺激に対する反応を観察できます。心電図の検査と同じように、患者さんの頭や手足に電極を設置して専用の装置で計測します。この神経反応を誘発電位と呼んでいます。日常生活で重要な体の運動について、手足の動き、顔面の動きやのどの動きなどはこの誘発電位を用いて術中に監視ができます。もちろん運動だけでなく、視覚、目の動き、聴覚、排尿なども誘発電位で監視下に手術が可能です。神経の電気反応はとても小さいので高性能の増幅装置が必要です。与える刺激や得られる信号を解析することで、より鋭敏で信頼性の高い誘発電位検査ができるように研究をしています。聖マリアンナ医科大学病院では麻酔科、看護部、メディカルエンジニアの協力を得て行っています。

左上:顕微鏡手術野。右下:誘発電位測定装置。たくさんのケーブルを患者さんにつなげて神経の電気活動を記録します。

誘発電位測定装置。手術操作を見ながら波形変化を判断し、術者にその変化を伝えます。
著書:
Goto T, Kodama K, Hongo K.: Monitoring of visual evoked potentials during para- and suprasellar procedures. Lofts, Cristopher M, Biller, Jose, Baron Eli M. Intraoperative Neuromonitoring, McGraw-Hill Education, NewYork, 2014: 243-254. (ISBN 9780071792233)
後藤哲哉.: モニタリング, 塩川芳昭, NS NOW No.15傍鞍部病変の手術, medical view社, 東京, 2011: 80-92(ISBN 9784758311946)
後藤哲哉, 本郷一博.: モニタリングの活用と腫瘍摘出度の決定(止めどき), 森田明夫, 新NS NOW 4脳脊髄腫瘍摘出のための引き出し, メジカルビュー社, 東京, 2015: 44-50. (ISBN 9784758315647)
論文:
Goto T, Tanaka Y, Kodama K, Kusano Y, Sakai K and Hongo K: Loss of visual evoked potential following temporary occlusion of the superior hypophyseal artery during aneurysm clipping surgery Case report. J Neurosurg 2007; 107(4): 860-864.
Goto T, Tanaka Y, Kodama K, Yomo S, Hara Y, Sato A, Hongo K.: Staple electrodes: an innovative alternative for intraoperative electrophysiological monitoring. J Neurosurg 2008; 108(4): 816-819.
Kodama K, Goto T, Sato A, Sakai K, Tanaka Y, Hongo K.: Standard and limitation of intraoperative monitoring of the visual evoked potential. Acta Neurochir (Wien) 2010; 152(4): 643-648.
Goto T, Muraoka H, Kodama K, Hara Y, Yako T. Hongo K.: Intraoperative monitoring of motor evoked potential for the facial nerve using a cranial peg-screw electrode and a “threshold-level” stimulation method. Skull Base 2010; 20: 429-434.
後藤哲哉, 本郷一博.: 脳神経外科術中運動誘発電位モニタリングにおける諸問題. Neurological Surgery 2017; 45:383-390.
後藤哲哉.: 脳腫瘍摘出術の成績を支える術中神経機能評価~電気生理学的検査と覚醒下手術~. 信州医学雑誌 2017; 365(1): 23-30.
後藤哲哉, 児玉邦彦, 原 洋助, 本郷一博.: フィブリングルー電極:経皮質刺激運動誘発電位測定における新しい刺激電極の提案. 信州医学雑誌 2018; 66(5): (印刷中)
Kanaya K, Goto T, Horiuchi T, Hongo K.: Comparison of Intraoperative Motor Evoked Potentials Monitoring with Direct Cranial Stimulation by Peg-Screw and Transcranial Stimulation by Corkscrew for Supratentorial Surgery. World Neurosurg. 2019 pii: S1878-8750(19)31031-9. doi: 10.1016/j.wneu.2019.04.039.
Hardian RF, Goto T, Fujii Y, Kanaya K, Horiuchi T, Hongo K.: Intraoperative facial motor evoked potential monitoring for pontine cavernous malformation resection. J Neurosurg. 2019 Jan 11:1-7. doi: 10.3171/2018.8
脳神経外科には難易度の高い術式があります。難易度の高い術式そのものを簡単にすることはできませんが、安全に、短時間で、合併症の発生を少なく行うための努力は必要です。解決策の一つとして、手術環境の改善は欠かせません。使い慣れた道具でも、使いにくい部分を改良していくことでより使いやすい道具に変えることができます。
①iArmS:顕微鏡下で細かい操作を行う際に、無理な体勢や重い術具、深部の狭い操作などは術者への負担が強くなります。術者の疲れや手の震えは手術の質に直結します。手や肘をどこかに支えてやることで減らすことができます。術者の手を支える手台がいろいろと開発されてきましたが、それらは固定式であり刻々とかわる術者の手の位置に対応できません。もし術者の移動に自動で追従し、操作の際には求める位置に自動で固定して手や肘を支える装置があれば、難度の高い手術操作を少しでも安全にこなすことができるはずです。私は2006年にこの研究を始めました。工学部の先生や企業の方たちとアイデアをだしあって、試作機を作ってはいろいろな先生から意見を聞くという作業を繰り返しました。その結果、2015年に株式会社デンソーからiArmSという装置が販売されました。iArmSは術者の手を支える手術支援ロボットです。ロボットといってもモーターはなく、各関節にブレーキとセンサーがついています。術者の手の移動をセンサーが感知してブレーキをロボット技術で制御することにより、上記の目的を達成します。現在このプロジェクトは株式会社デンソーの特許を東朋テクノロジー株式会社に技術譲渡し、コストダウンと安全性の向上を目指して新型機の開発を行っています。

iArmSの初期試作機: 2011年に製作したもの。手術用の椅子に取り付けて使用する手台。手台がどの位置にあっても重さのバランスがとれるように重りとバネが組み込まれています。

DENSO製iArmS 手術室での使用を想定したシミュレーション
iArmS臨床使用中のビデオ
デンソーホームページより
経済産業省 第6回ロボット大賞優秀賞受賞
グッドデザイン賞 2015年未来づくりデザイン賞受賞
第29回中日産業技術賞 中日新聞社賞
論文
Yako T, Goto T, Hongo K.: Usefulness and limitation of a freely movable armrest in Microneurosurgery. International Journal of Neurology and Neurosurgery 2009; 1(4): 185-190.
Goto T, Hongo K, Yako T, Hara Y, Okamoto J, Toyoda K, Fujie MG, Iseki H.: The concept and feasibility of EXPERT: intelligent armrest using robotics technology. Neurosurgery 2013; 72 Suppl 1: A39-42.
Hara Y, Goto T, Okamoto J, Okuda H, Iseki H, Hongo K.: An armrest is effective for reducing hand tremble in neurosurgeons. Neurol Med Chir (Tokyo) 2015; 55(4): 311-316.
Ogiwara T, Goto T, Nagm A, Hongo K.: Endoscopic endonasal transsphenoidal surgery using the iArmS operation support robot: initial experience in 43 patients. Neurosurg Focus 2017; 42(5): E10.
Goto T, Hongo K, Ogiwara T, Nagm A, Okamoto J, Muragaki Y, Lawton M, McDermott M, Berger M.: Intelligent Surgeon’s Arm Supporting System iArmS in Microscopic Neurosurgery Utilizing Robotic Technology. World Neurosurg. 2018 Nov;119:e661-e665. doi: 10.1016/j.wneu.2018.07.237
研究は2019年春に終了しましたが、実際にIoT化した手術室で手術を行い始めたのは2018年からです。今後この手術室での手術数が増えていき、これまでの手術室で行った時より良い成績となることが期待されています。

SCOT研究で製作した手術室。稼働する手術機器をIoT技術で接続し、時間同期して管理する。

接続された機器の情報は手術室外で術者以外の医師により判断され、その判断結果を術者にフィードバックする。
AMED: 国立研究開発法人日本医療研究開発機構 ホームページより
第一回日本オープンイノベーション大賞 厚生労働大臣賞
③ミズホ多目的ヘッドフレームシステム:脳神経外科手術において患者さんの頭部をぶれないように固定することは細かい手術のために必須で、そのために頭蓋固定装置があります。世界的にはメイフィールドスカルクランプシステムが有名ですが、それ以外の装置として国産ではミズホ株式会社が販売しているミズホ多目的ヘッドフレームシステムがあります。信州大学医学部脳神経外科初代教授の杉田慶一郎先生が開発したので、杉田システムと呼ばれています。杉田システムはメイフィールドと違って、頭部固定具部分に直接脳へらや手台を取り付けます。ヘッドフレームの位置がおかしいと手術がやりにくくなることがありますが、うまく使えば術野をコンパクトにまとめられ、より良い手術環境を得ることができます。杉田先生が本装置を開発してから40年が経過し、バージョンアップすることになりました。コンセプトは今までの機能を踏襲すること、使い勝手の悪い部分を改善することです。ヘッドフレームを長年使ってきた先生達にアドバイスをもらって、株式会社ミズホの開発スタッフと一緒に知恵を出し合いました。これからも改良をさらに加えながら先代の装置を上回る使いやすさを追求します。
論文
Goto T, Hongo K.: Difference between conventional head-pin and dispo-pin in the sugita multipurpose head frame system. Nurol Med Chir(Tokyo) 2013; 53: 21-25
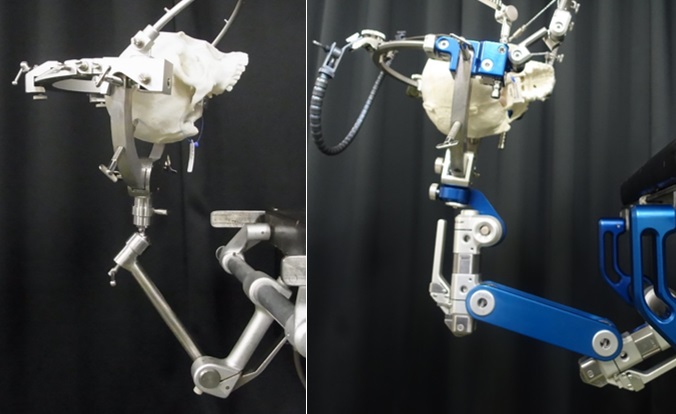
ミズホ多目的ヘッドフレームシステム頭蓋固定部分 左:旧型 右:新型 関節の自由度を増やしたことでサイズを小さくしても、固定範囲は同じ領域を確保しました。
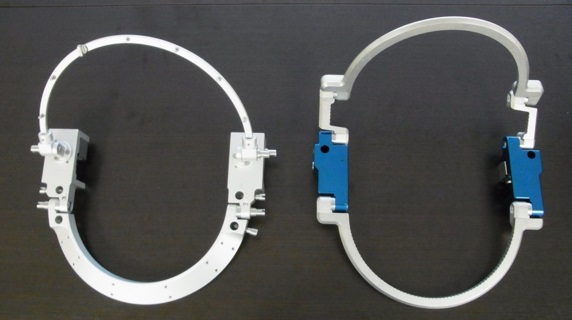
ミズホ多目的ヘッドフレームシステム術野取り付け部分 左:旧型 右:新型 ねじの突起を無くして、コードや吸引チューブの引っ掛かりを低減しました。
3.非侵襲脳圧測定
脳は頭蓋骨で囲まれた閉鎖空間にあるので、腫瘍や出血など頭蓋内に余分なモノができると、脳が押しやられ脳圧が上昇します。脳圧が上昇すると脳に血液が流れにくくなり、脳の活動が制限され、意識障害や麻痺がおきてきます。さらに脳圧が上昇すれば脳梗塞に至るため、そうなる前に治療しないといけません。点滴などの内科治療で脳圧を管理しきれないと判断したら、頭蓋骨を大きく外して圧力を逃がしたり、頭蓋内の余分なモノをとりのぞいたりする手術を決断します。ですから脳圧を細かく監視することは脳を守るための重要な作業です。脳圧の持続的測定は、頭蓋骨に穴をあけて圧センサーを設置する必要があるため、すべての患者さんにできません。このため、意識状態や麻痺の程度から類推したり、脳の画像検査から類推したりする方法で代用しているのが現状です。もし非侵襲に脳圧を持続的に測定できれば、脳圧が高い患者さんを圧センサー無しで管理できるようになり、また脳圧が高くなりそうな患者さんを早期に発見できるようになります。脳圧を非侵襲的に類推する研究は世界中で行われていますが、いまだ成功したグループはありません。
私は工学部の先生や、企業の皆さんと連携し、耳の穴から脳圧を類推する研究をしています。耳の穴の奥には鼓膜があり、鼓膜は耳小骨で内耳につながり、内耳はリンパ液で頭蓋内とつながっています。つまり頭蓋内は鼓膜を介して外耳道から観察できるのです。外耳道をふさぐようにイヤホンを入れて外耳道圧波形として鼓膜の動きを記録すれば、その中に脳圧を反映した情報が含まれているはずです。この外耳道圧波解析の難しいところは、すべての非侵襲脳圧測定の研究でもそうですが、脳圧を反映する情報以外のたくさんのノイズから必要な情報を拾い出すことや、個人差によるばらつきがあることで、それらにより判定があやふやになることです。私たちのグループは脳が動脈圧波により振動する共振現象に着目しています。脳圧の上昇や低下により脳は硬くなったり柔らかくなったりしていて、それにともなって共振周波数は上がったり下がったりしています。この共振周波数を外耳道圧波形の中から導き出す方法を研究しています。この研究は2018年11月よりAMED委託研究に採用され、この研究で得られたプログラムを搭載した機器を使って治験を行い、有効性を評価する予定となっています。
MEDIC日本医療研究開発機構委託 医工連携事業化推進事業より
臨床現場に直結する研究は、脳の病気で悩んでいる患者さんたちを治すためにはどうすればよいかと、私たちも悩むところから始まります。悩んだだけで終わってしまってはダメです。一人で悩んでいてもダメです。一人でできることはかぎられており、また一人ではくじけてしまうからです。仲間を巻き込んでみんなでやるのがおすすめです。解決するための道筋を考えるのが臨床研究の醍醐味です。選んだ道が正しければ良い結果が出るはずです。すべての悩みが解決できるわけではありませんが、私たちと一緒に努力しませんか。
謝辞:これら研究は下記企業、大学の皆さんにご協力いただき行われました。(50音順)
エアウオーター株式会社
株式会社イチカワ
株式会社デンソー
株式会社日立製作所
株式会社日本光電
株式会社フジタ医科器械
株式会社ユニークメディカル
東朋テクノロジー株式会社
パイオニア株式会社
ミズホ株式会社
信州大学:医学部、工学部、産学官連携推進本部
東京女子医科大学:先端生命医科学研究所
早稲田大学:理工学部